The robots breaking world records in 2026 didn’t emerge from nowhere. They emerged from forty years of incremental, largely invisible engineering work — secret laboratory programmes, publicly humiliating failures, and competitions that almost nobody covered at the time. Understanding where robot athletics stands today requires understanding where it came from. This is that history.
Video Overview (11:26 Mins)
Why Honda Spent 14 Years Building a Robot Nobody Knew About
Honda’s decision to build a humanoid robot in 1986 was, by any reasonable measure, an unusual choice for a car manufacturer.
The company’s internal justification centered on a simple engineering principle: the world is built for human bodies. Doors, stairs, vehicles, tools — all designed around human proportions and human movement. A robot capable of navigating that world without modification would need to look, and move, like a human being.

What followed was one of the longest continuous humanoid robotics programmes in history. The E0, Honda’s first prototype, completed a single forward step in five seconds — a speed roughly equivalent to a slow-moving toddler. The engineering team working on it knew this. The point wasn’t the speed. The point was that the machine was balancing at all, using only its own onboard systems, on two legs, without falling over.
The E-series ran from 1986 through to 1993 — six progressively refined prototypes, each one improving walking mechanics fractionally. E1 through E6 look nothing like what Honda eventually showed the public. They were exposed frameworks of actuators and sensors, with no casing, no humanoid aesthetic, and no pretense of being anything other than a walking experiment.
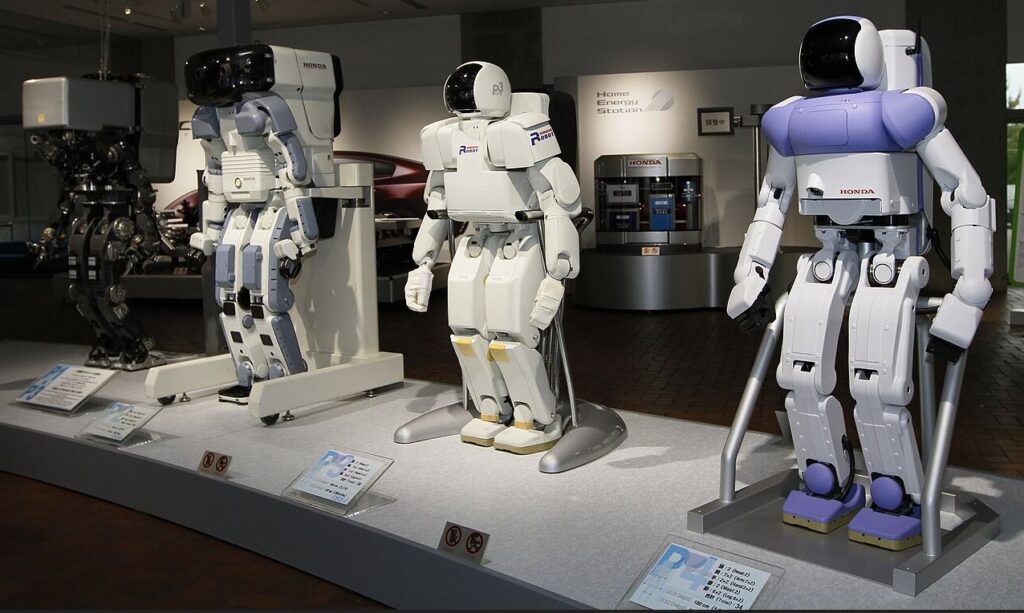
By 1993 Honda had added a torso and arms, transitioning to what became the P-series. P3, unveiled in 1997, was the version most engineers in the field point to as the genuine breakthrough — a fully self-contained, wirelessly controlled bipedal robot weighing 130 kilograms that could walk on flat surfaces and navigate stairs without any external support. Nothing like it had existed in a commercially developed laboratory before.
Honda spent eleven years building toward a public moment that hadn’t been announced and wasn’t expected. That moment arrived in 2000.
What Made ASIMO Different — And What It Couldn’t Do
ASIMO’s public debut in October 2000 generated coverage that Honda’s secretive research programme had deliberately avoided for fourteen years. Standing 120 centimeters tall — later revised to 130 centimeters in updated versions — it walked, climbed stairs, recognized faces and responded to spoken commands. For a mass audience encountering it through television news, it represented something that had previously existed only in science fiction.

The engineering innovations underlying ASIMO’s movement were more significant than the public demonstrations suggested. Honda had developed what it called i-WALK technology — a predictive movement control system that allowed ASIMO to anticipate the next step while still completing the current one, rather than pausing between movements the way earlier prototypes had. This continuous flow of motion was what made ASIMO look human rather than mechanical.
By 2004, ASIMO could run. Specifically, at three kilometers per hour — slow by human standards, but significant for an entirely different reason. Running requires both feet to leave the ground simultaneously, which means the robot is airborne for a fraction of each stride. Maintaining balance through that airborne phase required a substantially different set of control algorithms than walking, and Honda had solved it.

What ASIMO couldn’t do — despite two decades of development — was anything particularly useful in a real-world environment. The robot was most at home in controlled demonstrations: flat floors, predictable surfaces, scripted sequences. The dream of a humanoid robot assisting elderly people, navigating homes, performing practical tasks, never materialized in ASIMO’s lifetime.
Honda halted ASIMO’s development programme in 2018, not with a press conference but with a quiet internal memo. The robot was formally retired in 2022. Honda’s robotics research continues, now directed toward practical mobility technology rather than general-purpose humanoid demonstration — a significant shift in philosophy after thirty-six years.
The football kick image that circulated throughout ASIMO’s public life — the robot mid-stride, foot connecting with a ball — was never intended as a sporting demonstration. It was a motor control showcase. The fact that it remains one of the most widely shared images in robotics history, and that it preceded by more than two decades the robot football competitions now drawing global audiences, says something about public imagination that Honda’s engineers probably didn’t anticipate.
The Forgotten Rival — Why Nobody Remembers Sony’s QRIO
ASIMO’s dominance of the public narrative during the early 2000s obscured the fact that Honda had genuine competition.
Sony’s QRIO — originally developed under the name SDR-4X before being rebranded — was in many respects more agile than ASIMO. Smaller, at 58 centimeters, it could walk, run, dance, recover from trips without falling, and adapt its gait to different floor surfaces. Sony demonstrated it publicly from 2003 onward, including a series of performances with the Boston Dynamics quadruped BigDog that attracted significant attention in robotics research circles.
Sony discontinued QRIO’s development in 2006, citing a strategic shift away from entertainment robotics. The decision has been described by some researchers as one of the more consequential early exits in humanoid robotics — the platform had significant untapped potential at the point of cancellation.
The pattern QRIO established — a capable platform discontinued before reaching its ceiling — would repeat throughout the following decade. Schaft, a University of Tokyo spinout that won the 2013 DARPA Robotics Challenge trials before being acquired by Google and then quietly shut down in 2018. Boston Dynamics’ own PETMAN, retired after proving the walking algorithms it was built to test. Robotics history is substantially a history of platforms that advanced the field and then disappeared from it.
RoboCup — The Competition That Set a Deadline
While Honda and Sony were competing for public attention with their humanoid demonstrations, a parallel development was happening in academic robotics that would ultimately prove more consequential for the emergence of robot sport.
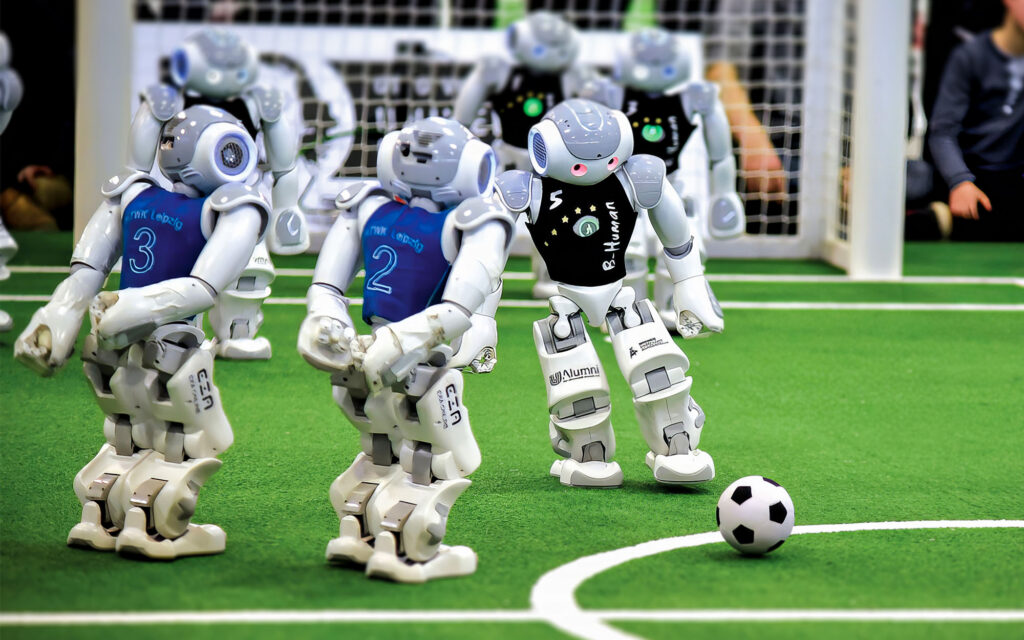
RoboCup was established in 1997 following a proposal by researchers Minoru Asada, Hiroaki Kitano and others who argued that robot football provided an ideal benchmark for artificial intelligence and robotics research. The stated goal — a team of fully autonomous humanoid robots capable of defeating the human World Cup champions by 2050 — was chosen specifically because it was ambitious enough to require sustained multi-decade research effort rather than producing a solution that closed the problem.
The first RoboCup was held in Nagoya, Japan, in August 1997, attracting 40 teams from 11 countries. The robots competing bore almost no resemblance to humanoids — most were wheeled platforms executing simple ball-tracking and kicking behaviors. The humanoid league, added to the competition in 2002, began with robots that fell over more often than they kicked.

The competition now attracts thousands of participants annually across multiple leagues and age divisions. The 2050 target, which read as aspirational fantasy to most observers in 1997, has become a genuine focal point for the robotics research community — and, given the rate of progress visible in 2025 and 2026, is now widely discussed as almost certainly achievable.
Boston Dynamics — From Military Contracts to Backflips
The company that would eventually produce the most capable general-purpose humanoid robot in commercial history didn’t start with humanoids and didn’t start with sport.
Marc Raibert’s work on dynamic legged locomotion began at Carnegie Mellon University in the late 1970s and continued at MIT through the 1980s, in what became known as the Leg Laboratory. The robots he built during this period were deliberately simplified — one-legged hopping machines, then two-legged runners — designed to isolate and solve specific problems in dynamic balance without the confounding complexity of a full humanoid form.

Boston Dynamics was founded in 1992 as a spinout from MIT, initially focusing on simulation software before transitioning to physical robot hardware under defence contracts from DARPA and the US Army. For most of the 1990s and 2000s, the company operated almost entirely outside public awareness.
Their quadruped robot BigDog, demonstrated publicly in 2005, attracted significant attention for its ability to traverse rough terrain and recover from kicks without falling. It was the first indication to a general audience that Boston Dynamics was building something categorically different from the demonstration robots Honda and Sony were showing at exhibitions.
PETMAN, unveiled in 2009, was the company’s first genuinely bipedal platform. Built specifically to test chemical and biological protection suits for the US military, it walked with a gait that genuinely resembled human movement — weight shifting naturally between feet, arms moving for balance — rather than the careful, deliberate steps of ASIMO-era robots. Its purpose was unglamorous: walk back and forth in a hazmat suit, check for leaks, repeat.
The engineering insights developed for PETMAN fed directly into what Boston Dynamics unveiled in 2013: Atlas, initially developed under a DARPA contract, hydraulically actuated, 1.8 metres tall, and designed to operate in disaster environments too dangerous for human responders. The connection between a chemical-suit-testing machine and the robot that would eventually execute a Ghost Rabona football trick shot is almost never mentioned in coverage of modern robot athletics.
The DARPA Robotics Challenge — When Falling Over Became News
The Fukushima Daiichi nuclear disaster of March 2011 exposed a gap that the robotics community had been aware of for years but hadn’t been forced to confront publicly: no robot in existence could operate reliably in the conditions first responders faced at the plant.
DARPA’s response was to launch the Robotics Challenge, a competition structured around the specific tasks that a robot would need to perform in a disaster environment — driving a vehicle to the site, opening doors, climbing stairs, using power tools, and turning valves. Tasks that any physically able adult performs without thought, and that no robot could perform reliably in 2012.

The competition ran in stages. A virtual phase in simulation was followed by physical trials in December 2013, where 16 teams competed at the Homestead Miami Speedway. The Finals took place over two days in June 2015 at the Fairplex in Pomona, California. Twenty-three teams competed for $3.5 million in prizes. Approximately ten thousand spectators attended each day.
What those spectators witnessed was a competition defined as much by failure as by success. Robot after robot fell attempting tasks that had seemed straightforward in simulation — exiting vehicles, navigating door frames, crossing rubble fields. The falls were not minor stumbles. Several robots went down hard, some twitching for seconds afterward as control systems attempted to execute commands that were ultimately impossible.

The crowd’s response to these failures was, by multiple accounts, unexpected. People groaned audibly when robots fell. They applauded when machines recovered. A reporter paused a press briefing to ask, with apparent genuine concern, whether the MIT team’s robot was physically okay.
DARPA programme manager Gill Pratt addressed this directly. According to IEEE Spectrum’s contemporaneous coverage of the event, Pratt acknowledged the paradox…
“It’s a pile of aluminum and copper wire and software… I don’t cheer for my laptop. But people cheer for these robots. And of course, when it falls, we all feel terrible.”
– Gill pratt –
Team KAIST from South Korea won the competition, their DRC-HUBO robot completing all eight tasks in 44 minutes and 28 seconds. The robot used a distinctive hybrid design — capable of kneeling down and rolling on wheels built into its knees for stability, then standing to walk when the terrain required it. Second place went to IHMC Robotics’ Atlas, third to Tartan Rescue’s CHIMP.

The most important outcome of the DARPA Robotics Challenge wasn’t the winning robot. It was the documentation of failure. Every fall, every software bug, every control system limitation exposed during the competition generated research that fed back into the field. The robots that fell in Pomona in 2015 were the direct ancestors of the robots breaking world records in 2026 — not despite their failures, but partly because of them.
The Electric Atlas and What Came Next
Boston Dynamics continued developing the hydraulic Atlas platform through the years following the DARPA Challenge. The robot’s public-facing demonstrations shifted from disaster response scenarios toward increasingly dynamic movement — a backflip in 2017, parkour sequences in 2019, a choreographed dance routine in 2020 performed to “Do You Love Me” by The Contours that accumulated over 37 million YouTube views.

These demonstrations served a dual purpose: proving the platform’s expanding capabilities to potential commercial partners and generating public interest in humanoid robotics at a time when most of the serious development work remained invisible to general audiences.
In April 2024, Boston Dynamics retired the hydraulic Atlas entirely. The replacement — an electric-actuated redesign announced the following day — was built not as a research platform or a demonstration vehicle but as a commercial product intended for industrial deployment. The aesthetic was deliberately different: smoother, more compact, with movements that prioritised efficiency over the dramatic dynamism of the hydraulic version’s parkour sequences.

The timing of this transition coincided with a broader acceleration across the humanoid robotics industry. Companies that hadn’t existed during the DARPA years — Unitree Robotics, Figure AI, Agility Robotics, 1X Technologies and others — had by 2024 each released capable general-purpose humanoid platforms of their own. The research that the DARPA Challenge had forced into the open, and the demonstrations that Boston Dynamics had made into public spectacle, had collectively legitimized the category sufficiently to attract the investment these companies required.
The connection between all of this and the robot athletic events that began generating headlines in 2025 and 2026 is direct. The robots competing in running events, football demonstrations and combat leagues today are built on control systems, balance algorithms and mechanical architectures that trace back continuously to Honda’s E-series prototypes, to PETMAN’s hazmat suit testing, and to the robots that fell over in front of ten thousand people in Pomona, California, in the summer of 2015.